The basic Distributed Imaging Algorithm
- A collection of low resolution images are acquired.
- An affine transformation is applied to each image so that the set is mutually registered.
- The full set of aligned low resolution images are back projected onto a common high resolution grid. This merger becomes the initial high resolution estimate.
- A subset of the low resolution images are selected. A camera model is calculated from the high resolution estimate to match the expected sampling, blurring, and transformation due to a specific sensor. The difference between the models and the images are measured and averaged. A specified fraction of this difference is used to correct the high resolution estimate.
- The process of comparing models against new subsets of low resolution images and updating the high resolution estimate is iterated. The process significantly reduces the mean error between the estimate and the scene.
The target object – an Air Force resolution chart |
Registration – The orientation of the camera determines how the image is formed. Typically, an affine transformation will describe the relative observations. |
Optical blurring and pixel layout degrade the image. In addition, sensor noise, quantization, and dynamic range can further reduce the fidelity of the scene. |
Sensor sampling reduces the available resolution. |
How does the algorithm aid imaging?
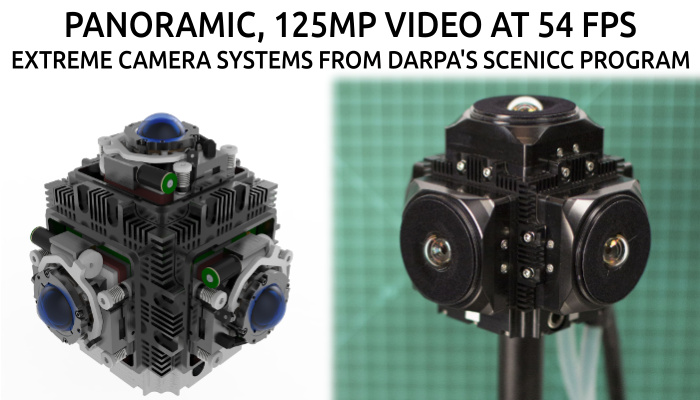
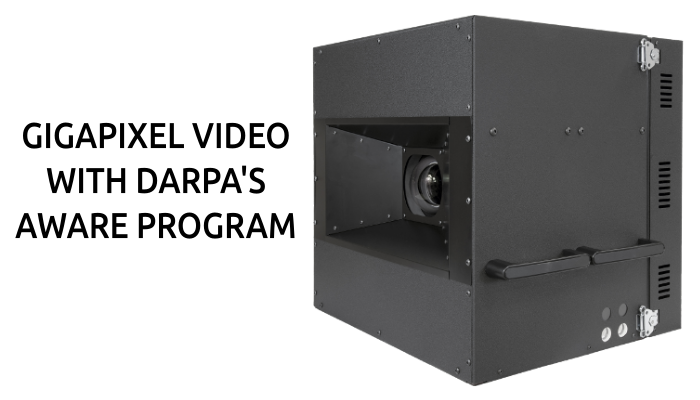
The results indicate that N2 low resolution image sensors can produce about the same performance as a single high resolution sensor with N times the resolution along each dimension. This indicates that a sufficiently large collection of sensors can produce images that exceed the resolution of state-of-the-art and yet to be developed systems. Potential applications could include inexpensive high resolution cameras, wide-angle surveillance with embedded high resolution regions (foveation), cameras with a planar profile, and so on.